
HMS Industrial Networks: Pokračujte v pohybu
Komunikační a bezpečnostní výzvy, kterým čelí výrobci mobilních robotů.

Aby však mobilní roboty mohly pracovat efektivně, potřebují bezpečnou a spolehlivou komunikaci. Tento článek popisuje hlavní problémy v oblasti komunikace a bezpečnosti, jimž čelí výrobci mobilních robotů, a popisuje snadný způsob, jak tyto problémy překonat, aby se mobilní roboty mohly volně pohybovat.
Co jsou mobilní roboty?
Než začneme, pojďme definovat, co máme na mysli mobilními roboty.
Mobilní roboty přepravují materiály z jednoho místa na druhé. Dodávají se ve dvou typech: jako automaticky naváděné vozíky (AGV) a autonomní mobilní roboty (AMR). AGV používají pro sledování předem stanovených tras naváděcí infrastrukturu (optická navigace pomocí barevných pásů nebo laserová pomocí odrazek, magnetické pásky). Jestliže nějaký objekt zablokuje dráhu AGV, vozík se zastaví a čeká, až bude překážka odstraněna.
AMR jsou dynamičtější. Navigují se pomocí map a pro detekci svého okolí a výběr nejefektivnější trasy používají data z kamer, vestavěných snímačů nebo laserových skenerů. Jestliže plánovanou trasu AMR blokuje nějaký objekt, vozík vybere jinou trasu. Protože AMR nejsou závislé na naváděcí infrastruktuře, je jejich instalace rychlejší a mohou se snáze přizpůsobit změnám v logistice.
Jaké jsou problémy v oblasti komunikace a bezpečnosti, jimž čelí výrobci mobilních robotů?
1. Navázat bezdrátové připojení
Prvním úkolem pro výrobce mobilních robotů je vybrat nejvhodnější typ bezdrátové komunikace. Obvyklá rada je stanovit si požadavky, vyhodnotit standardy a vybrat nejlepší shodu. Naneštěstí to není vždy možné, protože výrobce mobilních robotů často neví, kde bude stroj pracovat, a nezná přesné údaje o cílové aplikaci.
Někdy bude ideální připojení Bluetooth, protože nabízí stabilní připojení bez konfliktů a přetížení, ale jindy bude vyžadováno vysokorychlostní zabezpečené mobilní připojení. Pro výrobce mobilních robotů by bylo užitečné mít komunikační techniku, kterou by bylo možné snadno adaptovat tak, aby splňovala specifické požadavky dané úlohy.
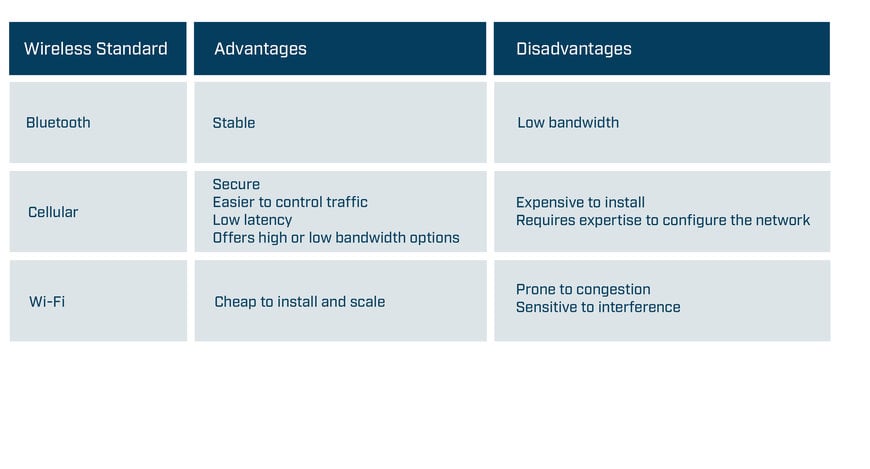
Bezdrátové standardy – výhody a nevýhody
Druhou výzvou je zajistit, aby instalace fungovala podle plánu. Před instalací bezdrátového komunikačního systému proveďte na základě výkresů zařízení průzkum pracoviště, abyste zajistili, že mobilní roboty budou mít dostatečné pokrytí signálem v celém pracovním prostoru. Průzkum pracoviště by měl určit optimální umístění přístupových bodů, správný typ antény, optimální úhel antény a způsob, jak zmírnit vliv rušení. Po instalaci zkontrolujte pracovní prostor snímači radiového signálu a podle potřeby přístupové body nebo antény upravte.
2. Připojení mobilních robotů k průmyslovým sítím
Mobilní roboty potřebují komunikovat s řídicími jednotkami na příslušném pracovišti, a to i přesto, že mobilní roboty a řídicí jednotky často používají rozdílné průmyslové protokoly. Například AGV mohou používat CANopen, zatímco řídicí jednotka PROFINET. Kromě toho mohou výrobci mobilních robotů chtít použít stejný model AGV na jiném místě, kde je řídicí jednotka používající jinou průmyslovou síť, např. EtherCAT.
Výrobci mobilních robotů musí také zajistit, aby jejich mobilní roboty měly dostatečnou kapacitu pro zpracování požadovaného množství dat. Požadované množství dat se přitom bude lišit v závislosti na velikosti a typu instalace. Velké instalace mohou využívat více dat, protože algoritmy směrování musí pokrývat větší plochu, více vozidel a více potenciálních tras. Také pokročilé navigační systémy, např. pro zpracování obrazů z kamer, vyžadují větší výpočetní výkon než instalace používající jiné navigační systémy, jako např. laserové snímače s odrazkami. Proto musí výrobci mobilních robotů vyřešit následující problémy:
potřebují komunikační techniku, která podporuje všechny průmyslové sběrnice a průmyslové sítě Ethernet,
změna způsobu komunikace musí být snadná, aby mobilní robot mohl komunikovat ve stejné průmyslové síti jako řídicí jednotka, aniž by bylo nutné měnit jeho hardware,
komunikační technika musí mít dostatečnou výpočetní kapacitu a funkčnost pro zpracování požadovaných dat.
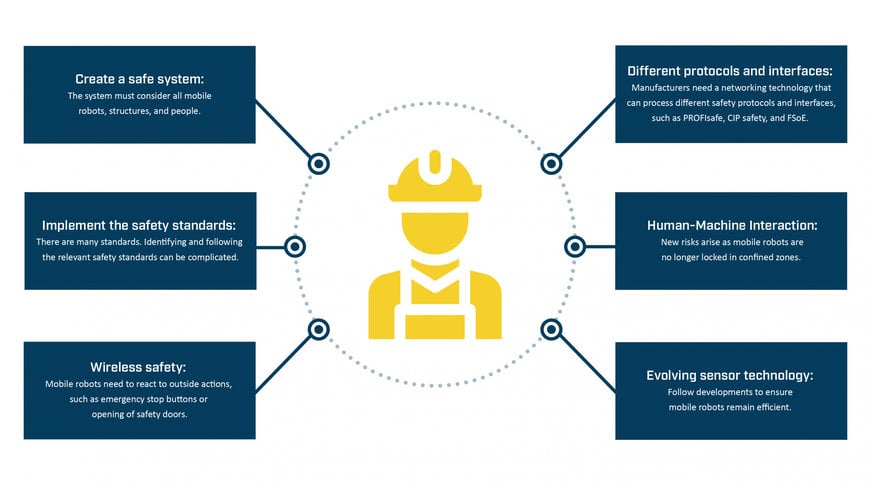
3. Vytvoření bezpečného systému
Vytvoření systému, kde mobilní roboty mohou bezpečně přepravovat materiál, je zásadní, ale náročný úkol. Výrobci mobilních robotů musí vytvořit systém, který bere v úvahu všechny mobilní roboty různých typů, stavební konstrukce a osoby vyskytující se v pracovním prostředí. Musí zajistit, aby mobilní roboty reagovaly na vnější akce, například když někdo otevře bezpečnostní dveře nebo stiskne tlačítko nouzového zastavení, a aby síťové řešení dokázalo zpracovávat různé bezpečnostní protokoly a rozhraní. Je třeba vzít v úvahu, že AMR se volně pohybují, a odpovídajícím způsobem vyhodnotit riziko kolize. Technika snímačů se neustále vyvíjí a výrobci mobilních robotů musí sledovat vývoj, aby zajistili, že jejich výrobky zůstanou co nejefektivnější.
Komunikační a bezpečnostní výzvy, kterým čelí výrobci mobilních robotů
Bezpečnostní normy
Bezpečnostní normy poskytují pokyny pro implementaci bezpečnostních komponent, přípravu prostředí a údržbu strojů nebo zařízení.
Přestože dodržování různých bezpečnostních norem (ISO, DIN, IEC, ANSI atd.) je v podstatě dobrovolné, po výrobcích strojů v Evropské unii se ze zákona požaduje, aby dodržovali bezpečnostní normy uvedené ve směrnicích o strojních zařízeních. Pro všechny výrobce mobilních robotů je vždy platná minimálně Směrnice o strojních zařízeních 2006/42/ES a v některých případech může být relevantní i směrnice 2014/30/EU regulující elektromagnetickou kompatibilitu zařízení. Směrnice o strojních zařízeních 2006/42/ES popisuje požadavky na konstrukci a zajištění bezpečnosti strojů uváděných na evropský trh. Výrobci mohou ke svým výrobkům připojit označení CE a dodat stroj svým zákazníkům pouze tehdy, jestliže mohou v prohlášení o shodě prokázat, že splnili všechny požadavky uvedené směrnice.
Ačkoli ostatní bezpečnostní normy nejsou povinné, výrobci by je měli dodržovat, protože pomáhají splnit požadavky Směrnice o strojních zařízeních 2006/42/ES. Výrobci mohou například dodržovat pokyny uvedené v normě ISO 12100, aby snížili zjištěná rizika na přijatelné zbytkové riziko. Mohou použít normy ISO 13849 nebo IEC 62061 k nalezení požadované úrovně bezpečnosti pro každé riziko a zajistit, aby odpovídající funkce související s bezpečností splňovaly určené požadavky. Výrobci mobilních robotů musí sami rozhodnout o tom, jak dosáhnou určité úrovně bezpečnosti. Mohou například snížit rychlost mobilního robotu, aby se snížilo riziko kolize a závažnosti zranění na přijatelnou úroveň. Nebo mohou zajistit, aby mobilní roboty mohly pracovat pouze v oddělených zónách, kam je zakázán přístup osob (definovaných jako uzavřené zóny podle normy ISO 3691-4).
Identifikace správných standardů a implementace požadavků je nejlepším způsobem, jak mohou výrobci AGV vytvořit bezpečný systém. Ale jak tento souhrn naznačuje, je to složitý a časově náročný proces.
4. Zajištění spolehlivé komunikace CAN
Spolehlivá a snadno použitelná komunikační technika založená na standardu CAN, který vznikl v 80. letech 20. století, je stále populárnější, zejména díky jejímu použití v různých rozvíjejících se průmyslových odvětvích, jako jsou systémy pro elektrická vozidla a systémy pro ukládání energie v akumulátorových bateriích (BESS – Battery Energy Storage System). Standard CAN umožňuje realizovat jednoduché, energeticky úsporné a nákladově efektivní komunikační sítě. Všechna zařízení v síti mají přístup ke všem informacím a jde o otevřený standard, což znamená, že uživatelé mohou zprávy přizpůsobit a rozšířit tak, aby vyhovovaly jejich potřebám.
Pro výrobce mobilních robotů je připojení CAN ještě důležitější, protože jim umožňuje sledovat lithium-iontové baterie, které se stále častěji používají jako zdroj pro pohony v mobilních robotech, ať už jde o novou instalaci nebo jejich dodatečnou montáž. Výrobci mobilních robotů musí provádět následující úkony:
2. Chránit systémy před elektromagnetickým rušením (EMI), které může zničit elektroniku systému. Riziko EMI je významné při modernizacích, protože přidání nových komponent, jako jsou baterie, těsně vedle komunikačního kabelu může vést k výskytu vysokofrekvenčních elektromagnetických poruch.
5. Vzdálený přístup k mobilním robotům
Možnost vzdáleného přístupu k řídicímu systému stroje umožňuje výrobcům mobilních robotů nebo technikům řešit většinu problémů bez nutnosti cestovat na místo instalace.
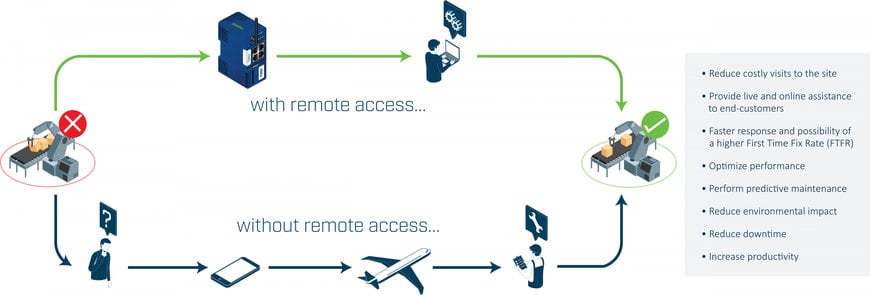
Výhody vzdáleného přístupu
Úkolem je vytvořit řešení pro vzdálený přístup, které vyvažuje potřeby oddělení IT a provozních techniků nebo dodavatelů.
Oddělení IT chce zajistit, aby síť zůstala dobře zabezpečená, byla spolehlivá a zachovávala si integritu. Proto by řešení vzdáleného přístupu mělo zahrnovat následující bezpečnostní opatření:
- použijte odchozí připojení namísto příchozích, aby byl dopad na firewall minimální,
- oddělte příslušný komunikační provoz od zbytku sítě,
- šifrujte a chraňte veškerý provoz v síti, aby byla zajištěna důvěrnost a integrita dat,
- zajistěte, aby dodavatelé pracovali v souladu s příslušnými normami pro kyberbezpečnost, jako je ISO 27001, nebo aby byli certifikováni,
- zajistěte, aby dodavatelé prováděli pravidelné bezpečnostní audity.
Závěr
Jak jsme viděli, výrobci mobilních robotů musí v oblasti komunikace a bezpečnosti vyřešit mnoho problémů. Musí umět navázat bezdrátové připojení, odesílat data prostřednictvím různých sítí, zajistit jejich zabezpečení, připojovat se k systémům CAN a bezpečně přistupovat k robotům na dálku. A aby to bylo složitější, musí být každá instalace znovu posouzena a přizpůsobena tak, aby splňovala individuální požadavky každého pracoviště.
Nejlepší postupy pro implementaci komunikace s mobilními roboty
Výrobci mobilních robotů jsou jen zřídka odborníky na komunikaci nebo bezpečnost. Proto pro ně může být časově náročné a nákladné vyvinout a otestovat požadovanou komunikační techniku vlastními silami. Využití komunikačních řešení třetích stran, které zohledňuje dané použití, nejen řeší aktuální požadavky na komunikaci, ale také poskytuje další výhody.
Moderní komunikační řešení mají modulární konstrukci umožňující výrobcům mobilních robotů odebrat síťový modul určený pro jeden standard nebo protokol a nahradit jej jiným modulem, aniž by to mělo vliv na jakoukoli jinou část stroje. Například v jedné instalaci může být nejvhodnějším standardem pro bezdrátovou komunikaci Bluetooth, zatímco v jiné je třeba využít Wi-Fi, protože má větší pokrytí. Podobně může jedno pracoviště používat protokoly PROFINET a Profisafe, zatímco jiné může používat odlišné průmyslové a bezpečnostní protokoly. V obou případech mohou výrobci mobilních robotů použít komunikační moduly ke změně síťové komunikace tak, aby splňovala místní požadavky, aniž by provedli jakékoli změny v hardwaru.
Autoři:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks je firma specializovaná na průmyslovou komunikaci se sídlem ve Švédsku, která dodává různá řešení pro komunikaci AGV. Další informace naleznete na adrese www.hms-networks.com/agv
